



Use cases
Get more out of it! LiDAR Scanner – (6) (Final series) [Modeling point clouds collected with an iPhone/iPad and comparing them with TLS]

In the previous series, we explained how to use point cloud data as-is, which is one way to better use point clouds collected with an iPhone/iPad.
In this series, we explain the benefits of using point clouds to create models instead of using them as-is. In addition, we compare the model to a model created from point clouds collected with a 3D terrestrial laser scanner (hereafter, “TLS”).
The general impression is that point clouds collected with a TLS are more accurate and easier to work with. We compare them to point clouds collected with an iPhone/iPad LiDAR scanner to find their specific differences.
Benefits of modeling point clouds
First, let us explain the benefits of creating models from point clouds.
For the benefits described here, it does not matter whether the point clouds were collected with a LiDAR scanner or with a TLS. The benefits of modeling, as generally described, are expected to be applicable.
The benefits include the following:
- Data can be shared by exchanging small files.
- Dimensional measurement consistently produces the same results regardless of who takes the measurements.
- The scanner’s blind spots can be supplemented to ensure collision checking without missing any areas.
- Visibility is improved.
Please read the article “Benefits of modeling point clouds,” for detailed survey results and explanations.
Note that the point clouds collected with an iPhone/iPad LiDAR scanner will be coarse (low resolution), so they will get more benefit from the five points above than the point clouds collected with a TLS.
To what extent can we model point clouds collected with an iPhone/iPad LiDAR scanner?
See the following.
Modeling point clouds collected from an iPhone/iPad
This article explains how to create models using our large-scale point cloud processing software “ClassNK-PEERLESS.”
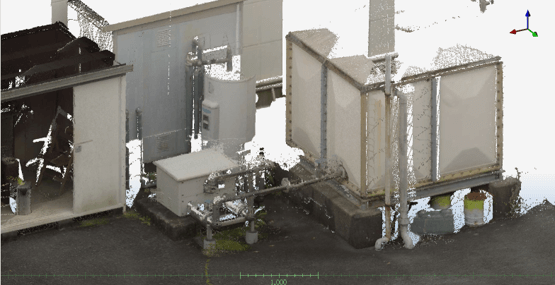
The objects of modeling are inside the room in the following image. We used the “tips” for collecting as much “usable” data as possible, which are covered in Series (2) and (3).
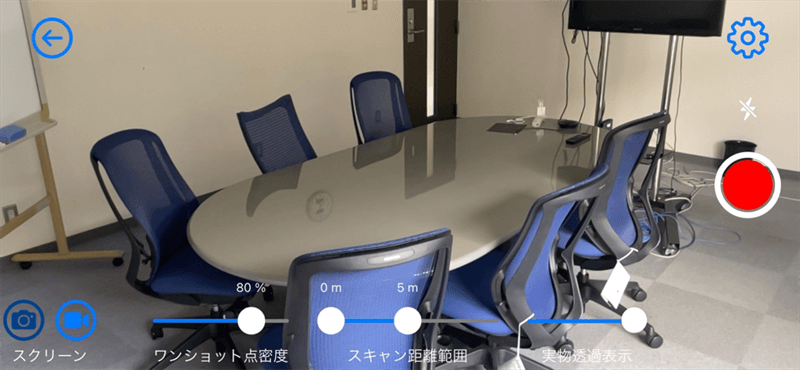
As a result, we collected the point clouds shown below.
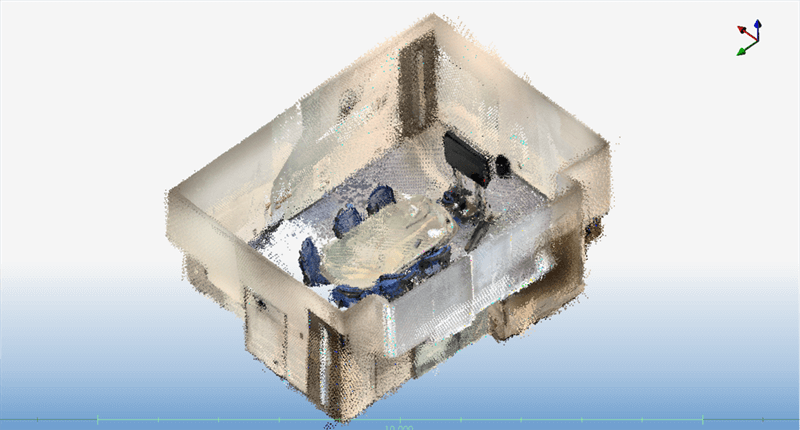
The resulting image after modeling the point clouds with “ClassNK-PEERLESS” is shown below.
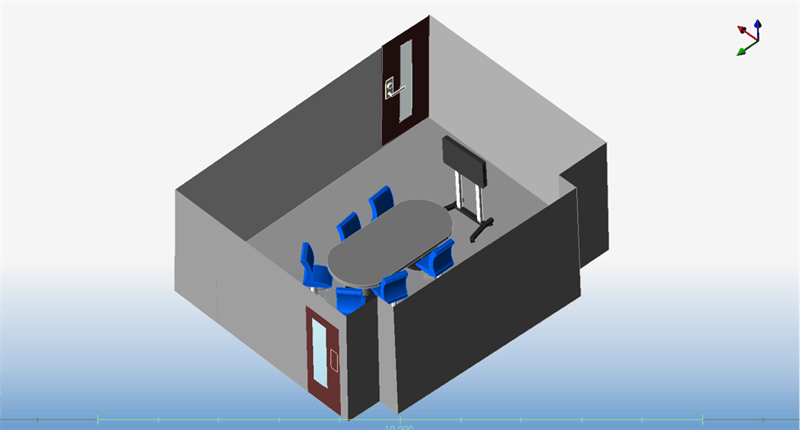
At first glance, the modeling appears to be successful.
In conclusion, it is possible to model point clouds collected with an iPhone/iPad LiDAR scanner.
Of course, it depends on the modeling software you are using.
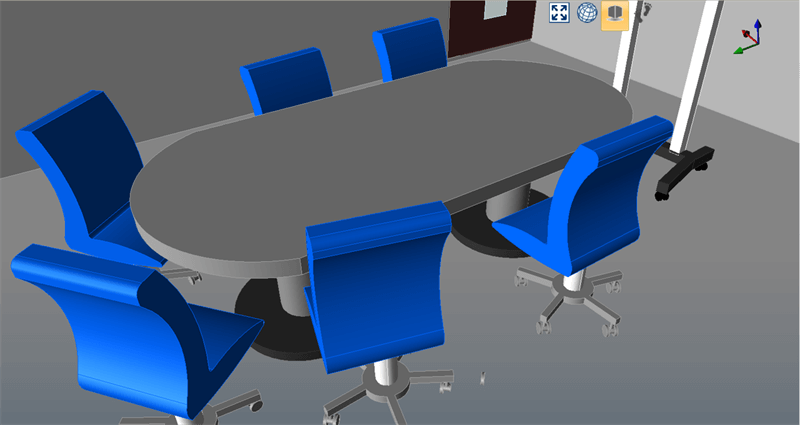
“ClassNK-PEERLESS” provides functions that enhance the ease of operation or simulate sketching in a CAD system, allowing you to create models with a degree of perfection, as shown above.
The resulting image of the model looks good. What is the difference from a model created from point clouds collected with a TLS? Let’s take a closer look at the models.
Difference in modeling (1): Point clouds cannot be imported under certain circumstances.
First, the difference between point clouds collected with an iPhone/iPad LiDAR scanner and those collected with a TLS is as follows:
- Point clouds collected with a TLS: Point clouds with polar coordinate system information (grid information).
- Point clouds collected with an iPhone/iPad LiDAR scanner: Discrete point clouds (point clouds without polar coordinate system information, random point clouds).
This difference may affect cases where point clouds are imported into point cloud processing software.
There are many types of point cloud processing software that can import point clouds collected with a TLS (point clouds with polar coordinate system information). To import data in such a case, common point cloud file formats include .fls/.fws/.ptx/.zfs/.e57.
Meanwhile, for some software, discrete point clouds without polar coordinate system information, such as those collected with an iPhone/iPad LiDAR scanner, may not be imported or may not be modeled even if they are imported.
To import discrete point cloud files, ClassNK-PEERLESS supports file formats .pts/.e57/.las/.xyz/.asc/.csv.
Difference in modeling (2): An auto-create function cannot be used.
ClassNK-PEERLESS has an “Auto Pipe Creation” function that automatically recognizes and creates pipes.
Other similar software may also have an automatic recognition feature, although it may differ from ours in some of the details.
This feature is very useful for modeling.
The images below show the results of creating pipes using the “Auto Pipe Creation” function.

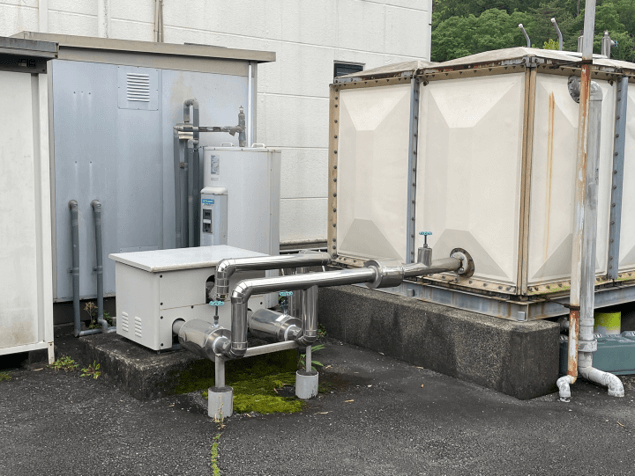
The photo below shows the actual image. As you can see from the photo, almost all of the pipes are recognized and created by the software.
The images below show the results of measuring at the same location with an iPhone/iPad LiDAR scanner and using the “Auto Pipe Creation” function.
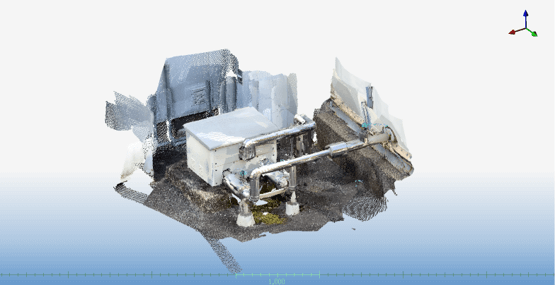
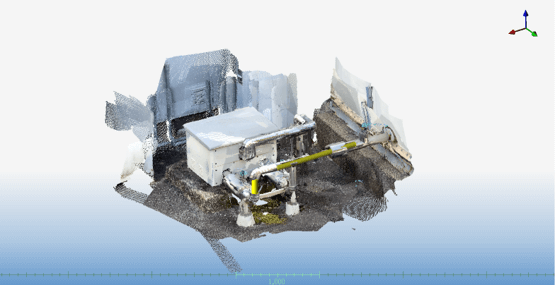
As you can see in the second image, only a few pipes are recognized.
The function could not be used originally, or if it could, the pipes were not recognized.
This result is due to large pitches between the points captured by the iPhone/iPad LiDAR scanner (6–7 mm on average) and excessive overlap of the point clouds (irregular surface). In particular, the excessive overlap of the point clouds significantly affects the automatic creation function.
The automatic creation function is not very useful; however, for ClassNK-PEERLESS, pipes can be created using the manual creation function.
Difference in modeling (3): Difficult to create planes
ClassNK-PEERLESS recognizes the point cloud you have painted with the mouse pointer and creates a plane, such as walls, floors, or ceilings, from the point cloud.
Watch the video on how to create planes.
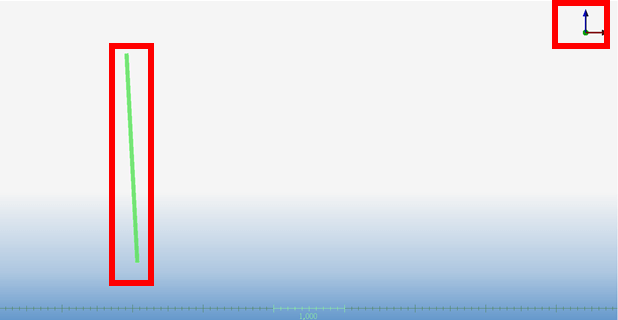
Below is an example of a plane created from the point clouds collected with a TLS.
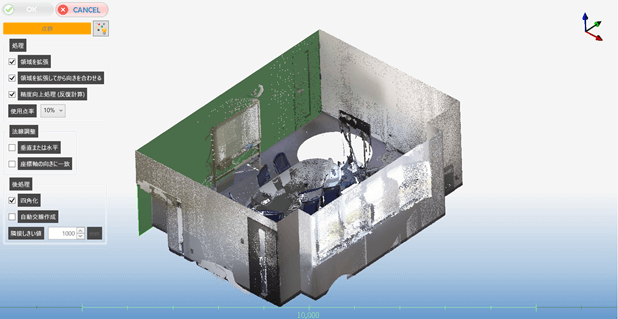
The green area is the created plane.
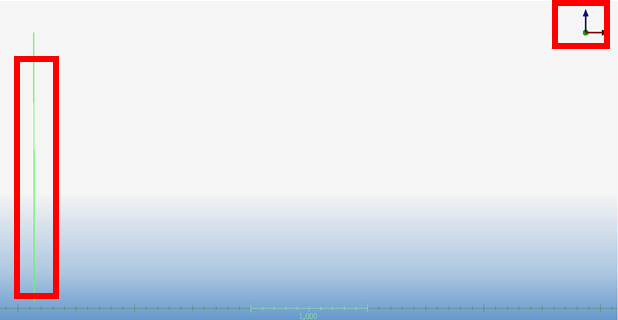
Looking at the created plane from the Y-axis direction, you can see that the wall is vertical.
As shown in the image, point clouds collected with a TLS can be used to create planes that meet your needs.

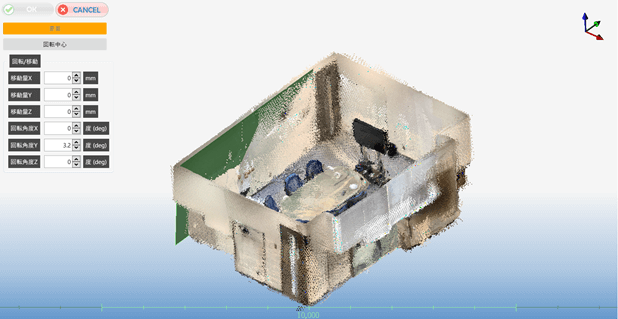
Next, let’s take a look at the plane we created from point clouds collected with an iPhone/iPad LiDAR scanner.
We created the plane shown in green.
You can see that the point clouds of the wall remain in front of and behind the green plane.
Looking at the created plane from the Y-axis direction, you can see that the wall is tilted.
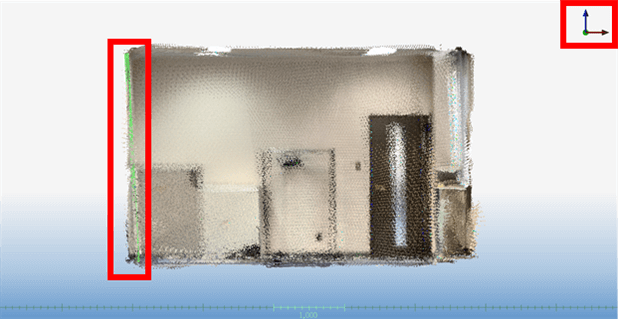
As in the case of the auto pipe creation, the tilted wall was caused by the excessive overlap (irregular surface) of the point clouds collected with an iPhone/iPad LiDAR scanner.
Another cause was the misalignment that occurred during the simultaneous localization and mapping (SLAM) of the collected point clouds. This misalignment is likely to occur when creating a shape that does not have feature points, such as a plane.
To deal with such misalignments, ClassNK-PEERLESS provides a plane creation feature that allows you to create planes using a high-density point cloud as a reference to minimize deviations. By setting parameters, you can also create horizontal and vertical planes.
Difference in modeling (4): Extent of deviation
In terms of deviations between the collected point clouds and the created models, there are also differences between point clouds collected with an iPhone/iPad LiDAR scanner and those collected with a TLS.
First, the color map below shows the deviations when a model (plane) is created using point clouds collected with a TLS.
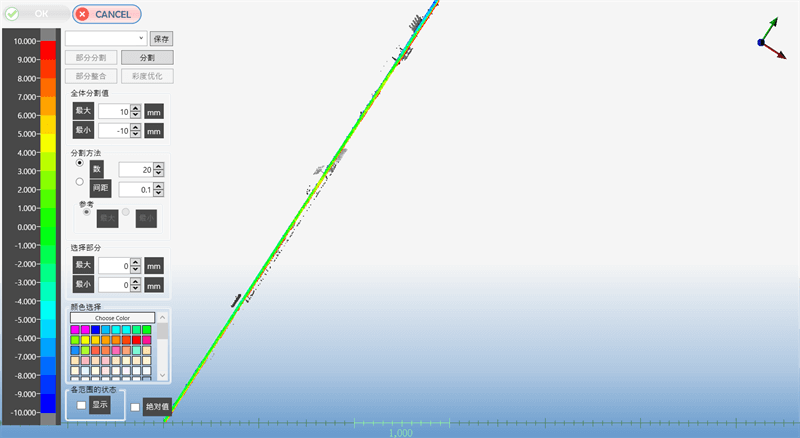
You can see that the deviations are roughly within a range of ±3 mm.
The next color map shows the deviations when a model is created using point clouds collected with an iPhone/iPad LiDAR scanner.
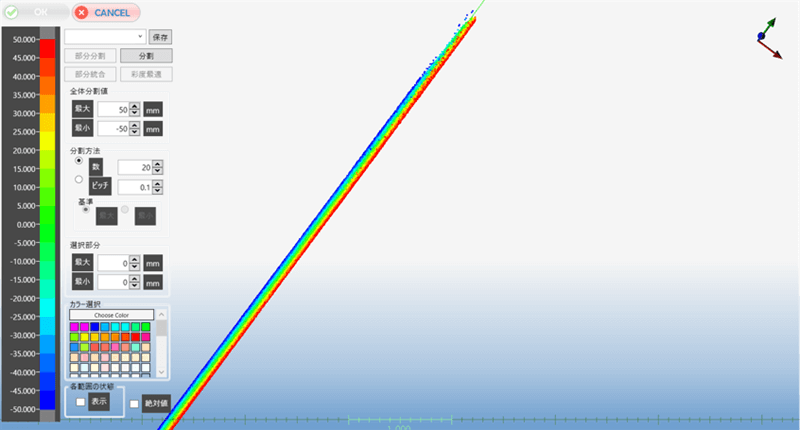
In this map, you can see that the deviations are in the range of ±50 mm.
As in the other verification results, this is due to large pitches between the points captured by the iPhone/iPad LiDAR scanner and excessive overlap of the point clouds. Compared to TLS, deviations are more likely to occur with an iPhone/iPad LiDAR scanner.
Please keep in mind that modeling from point clouds collected with an iPhone/iPad LiDAR scanner will have a deviation of 2–5 cm, depending on the circumstances.
Conclusion
This series focuses on point clouds collected with an iPhone/iPad LiDAR scanner to verify the effectiveness of modeling from them and compare them with point clouds collected with a TLS.
Although there is some inconvenience, modeling is possible, but we have to accept a deviation of about 5 cm.
Therefore, applications of modeling from point clouds collected with an iPhone/iPad LiDAR scanner are likely to be limited to cases where only visual information is sufficient, such as determining the positional relationship of objects, supplementing to a TLS, or using it in the review stage of remodeling.
How was it?
This is the final article of the series.
Although iPhone/iPad LiDAR scanners are inferior to TLS in terms of ease of point cloud handling and resolution, they are attractive in terms of ease of scanning. We hope you enjoyed the “Get more out of it! LiDAR scanners” articles and found them helpful.
tag : LiDAR Sakura3D SCAN laser scanner