



Use cases
Get more out of it! LiDAR Scanner – (4) [Tips for composing data collected with LiDAR and a fixed-type scanner]

LiDAR scanner (2) and (3) provide tips for taking measurements using LiDAR scanner applications. LiDAR scanner (4) summarizes the tips for “composing data” in post-processing.
As one of the uses of the LiDAR scanner application (Sakura3D SCAN), Armonicos recommends using it to complement the data in areas where it is difficult to measure with a fixed-type scanner.
“Areas where it is difficult to measure with a fixed-type scanner” means areas with complicated layouts, including embedded equipment, making it difficult to install a scanner.
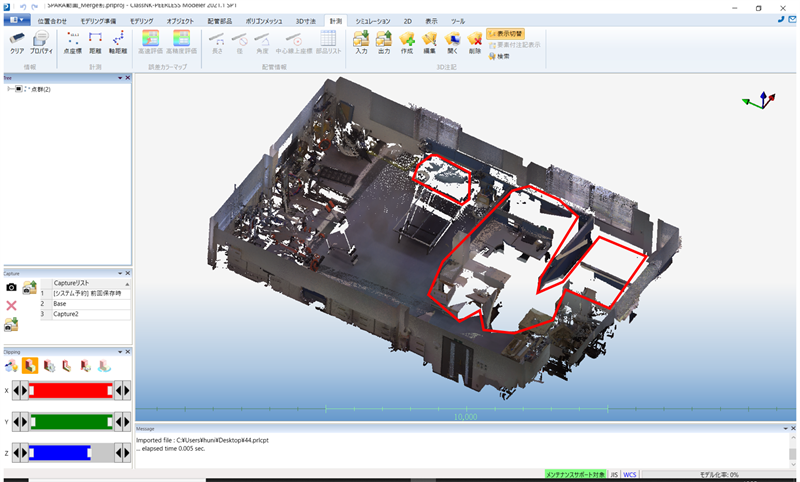
In this survey, the red-framed areas in the image below were measured as a complicated layout area.
A fixed-type scanner was used to measure most parts of the room, while a LiDAR scanner was used to measure the red-framed areas. The two images captured by these scanners were combined into a single image.
Why is data composition (alignment) necessary?
Before presenting the tips, we will explain why data composition is necessary after point cloud measurement.
When an iPhone/iPad is used to measure point clouds, the number of point clouds that can be obtained in one scan is limited by the specifications of the device being used. Of course, it falls far short of a fixed-type scanner.
It is therefore necessary to increase the number of shots (scan times) to measure a target that is relatively large in size or range.
Due to the nature of the scanner application, the measurement start point is set to the origin for each shot. As a result, multiple shots taken will be out of alignment.
For this reason, it is necessary to compose (align) the data using point cloud processing software.
Survey 1: Alignment using point cloud processing software
The following data and software were used in this survey:
- Point cloud data collected and output from Sakura3D SCAN
- Point cloud data collected and output from a fixed-type laser scanner
- Our third-party point cloud processing software
Our third-party point cloud processing software has an auto-align feature, but it was not helpful.
Because the point clouds output from the iPhone/iPad have a low accuracy and excessive point cloud overlap, some point cloud processing software may not be able to align them. This may be the cause of the failed auto-alignment.
We wanted to change the method to manual alignment, but our staff were not familiar with this point cloud processing software, so we used the software we normally use. Continued to the next survey.
Survey 2: Manual alignment using ClassNK-PEERLESS
In this survey, manual alignment was tested using the following data and software:
- Point cloud data collected and output from Sakura3D SCAN
- Point cloud data collected and output from a fixed-type laser scanner
- Large-scale point cloud processing software, ClassNK-PEERLESS
We used ClassNK-PEERLESS because our staff are familiar with it, but the tips provided here will help you use your own point cloud processing software.
Tip 1: Before you begin alignment
The simplest manual alignment method is to align the three planes to a reference. The tip for effectively using this method is to scan the target to include three or more planes in each shot.
For the best scanning results, try to scan as many flat areas as possible, as shown in the image below.

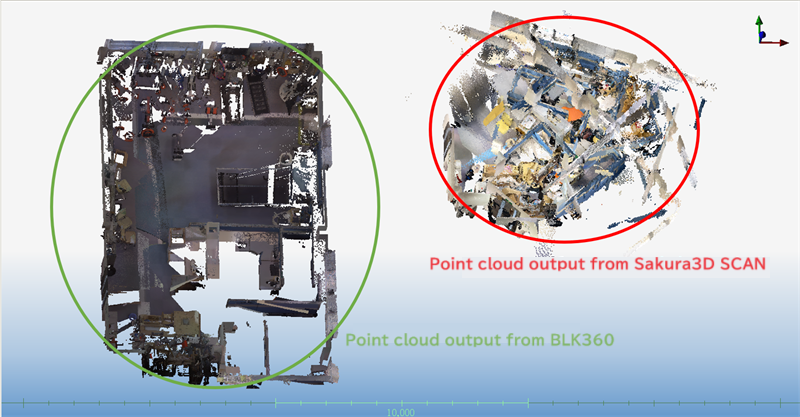
Tip 2: Determine the reference data
Use the point cloud data of the shot, which is accurate and covers a large area, as a reference. In general, point cloud data obtained with a fixed-type scanner is more suitable than point cloud data obtained with an iPhone/iPad. Use the point cloud data collected and output from a fixed-type scanner as a reference.
Tip 3: Import the reference point cloud data into the alignment software (in this case, ClassNK-PEERLESS), and then align the X, Y, and Z axes. This helps eliminate the difficulties associated with view operations or geometry verification caused by misaligned axes.
Then, import the point cloud data (in this case, Sakura3D SCAN) measured and output from an iPhone/iPad.
Use the manual alignment function for alignment.
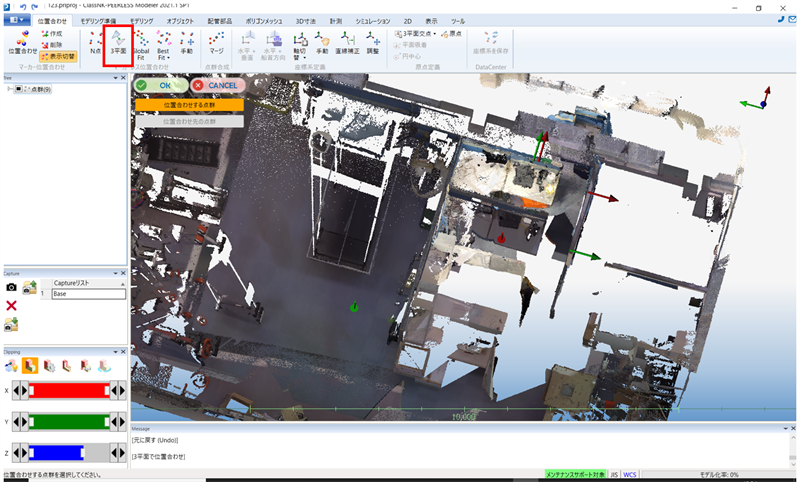
The “3 planes” function was used to align the two selected shots by specifying three planes.
Tip 4: After the alignment, be sure to check each shot. Errors are likely to occur in manual alignment; check each shot to prevent errors.
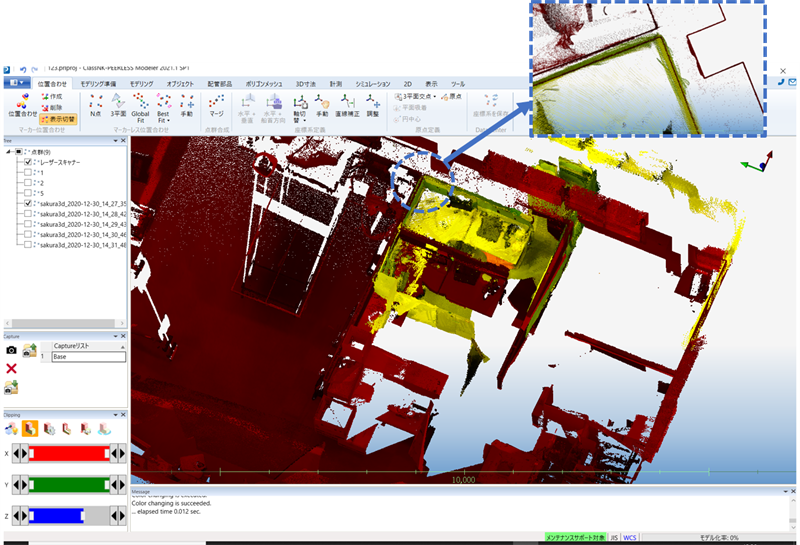
(ClassNK-PEERLESS can display point clouds in different colors for each shot. You can visually check the degree of misalignment.)
Repeat the process to complete the alignment.
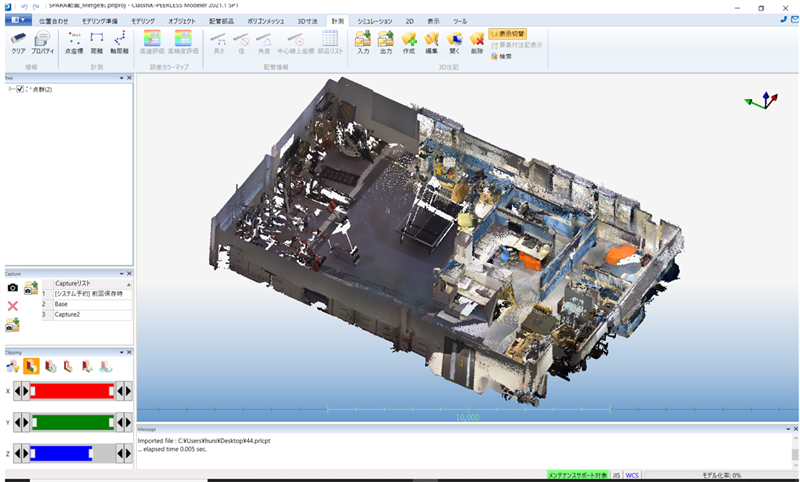
How was it? The red-framed areas shown at the beginning have been complemented and combined into a single data set.
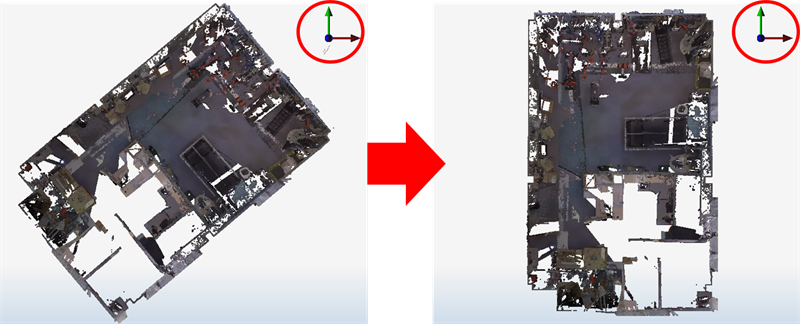
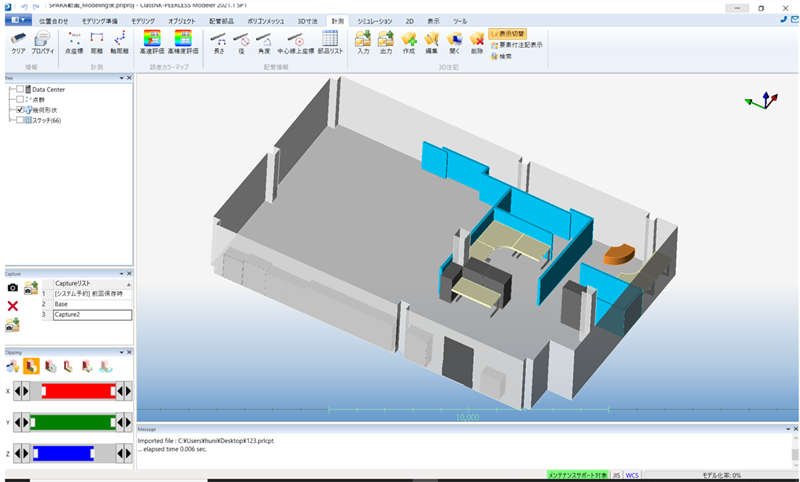
Additional information
Below is the result of reverse modeling after the data composition.
Conclusion
Here is a summary of the tips for composing point cloud data collected with an iPhone/iPad and point cloud data collected with a fixed-type scanner.
- Scan the target to include three or more planes in a single shot.
- Use the point cloud data of the shot, which is accurate and covers a large area, as a reference. (Use point cloud data output from a fixed-type scanner.)
- Before you begin alignment, align the X, Y, and Z axes of the reference data.
- Complete the alignment by checking the results of each shot.
Lastly, please note the following:
Point cloud data obtained with LiDAR and point cloud data obtained with a fixed-type laser scanner differ significantly in accuracy. Consider the difference that LiDAR scanners use centimeter units, while fixed scanners use millimeter units. When a 3D model is created using the method described here, each area of the model will have a different resolution, and the reproducibility of the 3D model will vary depending on the point cloud used as a reference. When using a reference, choose one that fits the purpose of your application to promote the use of 3D models.
We hope you now understand one of the uses of LiDAR scanners: “Complementing the areas where it is difficult to measure with a fixed scanner.” As with measurement, data composition requires certain techniques, but we believe they are helpful once you get used to them. We encourage you to apply it to your operations.
February 24, 2022
tag : LiDAR Sakura3D SCAN