



Use cases
Get more out of it! LiDAR Scanner – (2) [How to collect data as “usable” as possible with LiDAR Scanner applications – Part 1]

The iPhone/iPad LiDAR scanner is affordable and easy to use, making it simple to take measurements and obtain point clouds and polygon mesh data. However, it is still inferior in accuracy, and there may be some applications where it cannot be used.
So, we explored ways to use 3D measurement applications on the iPhone/iPad LiDAR scanner to obtain the most accurate data possible that could be used for post-processing.
Of course, “the most accurate data possible” does not mean that you can expect to obtain data with the same level of accuracy as with an expensive instrument.
However, given how easy it is to obtain data, we think it’s worth trying.
This survey covered the iPhone and “Sakura3D SCAN.” If you pay attention to the same points in other 3D measurement applications, the results should be slightly better than without considering these points.
Survey subjects
Survey 1: Distance to the target object
In this survey, the area was roughly divided into four parts.
Target
The table below shows the results.
| Distance to the target object | Up to 0.3 m | 0.3 to 5 m | 5 to 7 m | 7 m and up |
|---|---|---|---|---|
| Result | Not measurable | Most suitable | Difficult to handle | Not measurable |
The measurement result screens for each distance range are shown below.
Range: Up to 0.3 m
Too close to detect the target object.
It was possible to obtain point clouds when the distance to the target object was 15 cm, but noise was more likely to occur, and shots were more likely to be off. The acquisition of point clouds became stable when the distance to the target object was 30 cm. It is recommended to maintain a distance of at least 30 cm.
Range: 0.3 to 5 m
The target object was well detected. The point clouds were easy to handle.
Range: 5 to 7 m

The results were unreliable, such as a decrease in measurable point clouds and errors due to the inward curvature of the shapes.
Range: 7 m and up

Too far to detect the target object.
As a result, measuring the target at a distance ranging from 0.3 to 5 m showed the most favorable results.
When the distance exceeded 5 m, it was difficult to obtain point clouds, and errors occurred due to the curvature of the shapes, even if point clouds could be obtained; the obtained point clouds were considered unusable.
The reason for the poor point cloud results at a distance of 5 m or more is that the LiDAR built into the iPhone/iPad can only measure up to 5 m in the depth direction. Given the specifications of the LiDAR, this is unavoidable.
Survey 2: Measurement environment
This survey focused on the following two points:
- Location (Indoor vs. Outdoor)
- Brightness (Light vs. Dark)
Indoor vs. Outdoor
Measurements were taken using a wall as the target object. (Measurement time: around 11 am in August)


There were no significant differences.
Neither seemed to have a problem with the results.
Light vs. Dark
Measurements taken with the light on were compared to those taken with the light off. (Measurement time: around 7 pm in August)

As you can see from the image taken with the light off, it may not be possible to take measurements in a dark place, but the resulting image tends to have increased noise or overlapped shots.
It was impossible to take measurements in complete darkness, but it became possible when the iPhone flashlight was used.

The measurement was not affected by the place where it was taken, whether indoors or outdoors, but was affected by the brightness of the place where it was taken. It was found that well-lit locations gave better results.
It is recommended that the iPad/iPhone flashlight be used when you need to take measurements in a dark place.
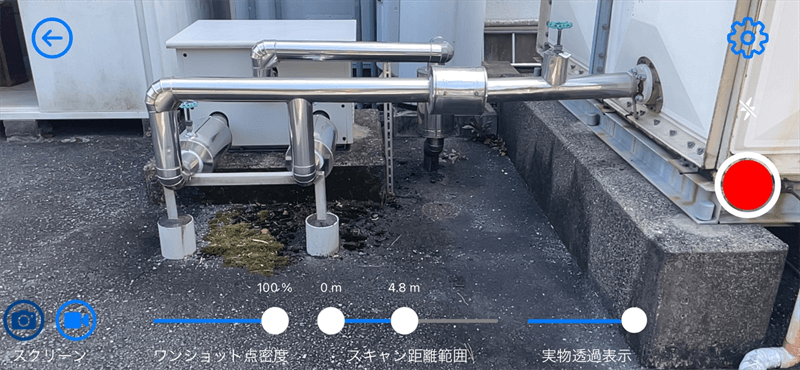
Survey 3: Density of the point cloud to be obtained
In this survey, the cloud density results between low and high were compared to show that the difference in the point cloud density affects the ease of data handling.
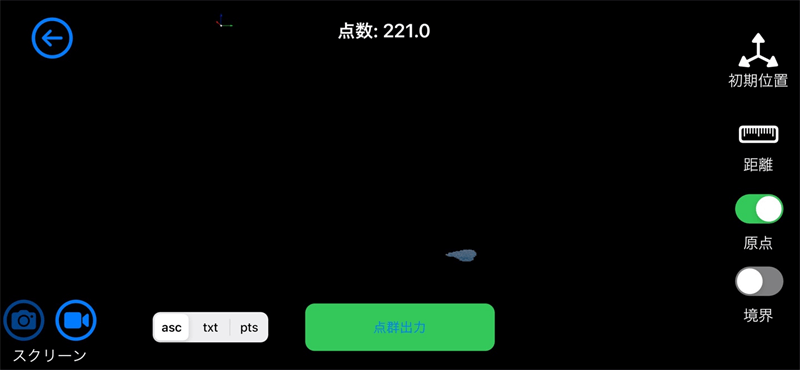
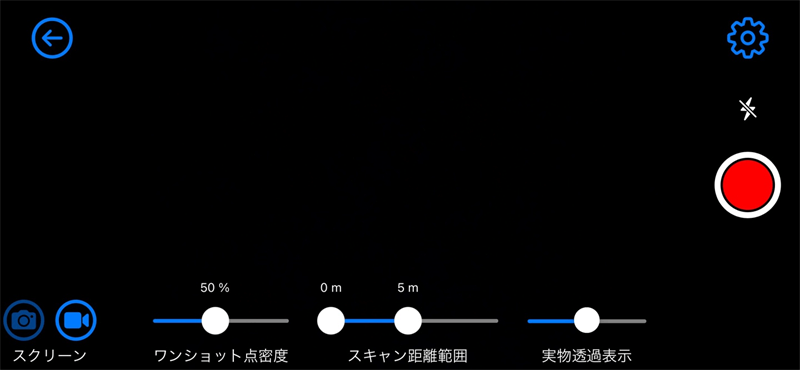
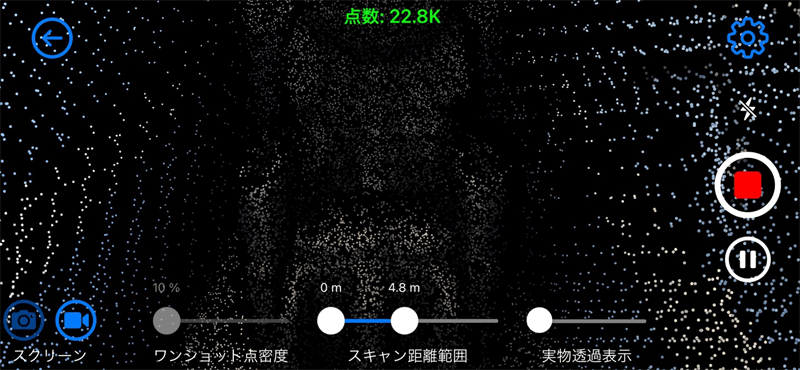
When the number of points to be obtained is small (low density)
*The value is displayed in green, which means there is space available on the device memory (iPhone 12 Pro).
As you can see from the image, it includes the following issues:
・It is difficult to identify the target object geometry from the resulting image after measurement.
・It takes time to measure because of the small number of points that can be obtained in one measurement.
・Errors tend to stand out due to the extended time required for measurement.
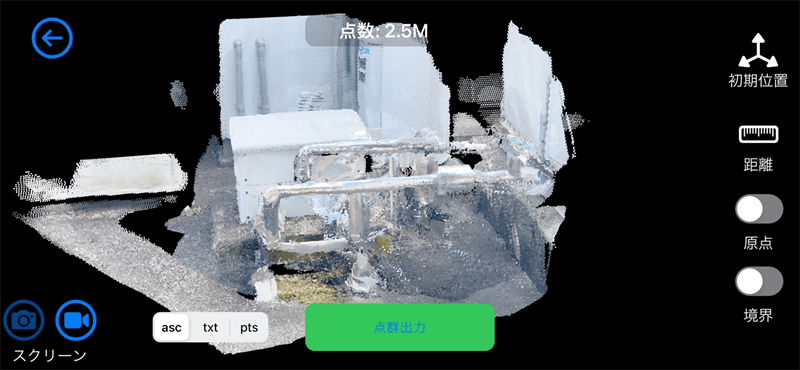
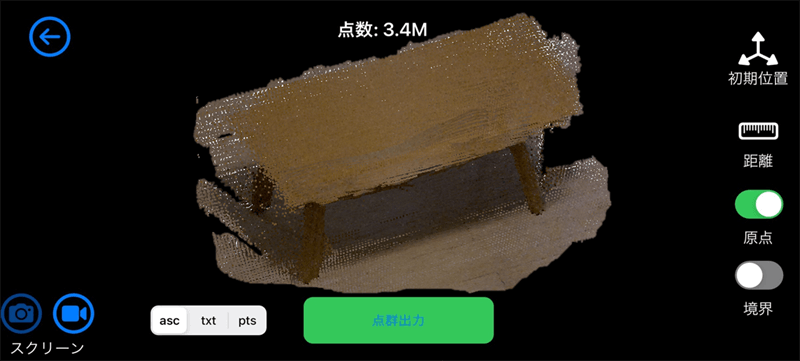
When the number of points to be obtained is large (excessive high density)
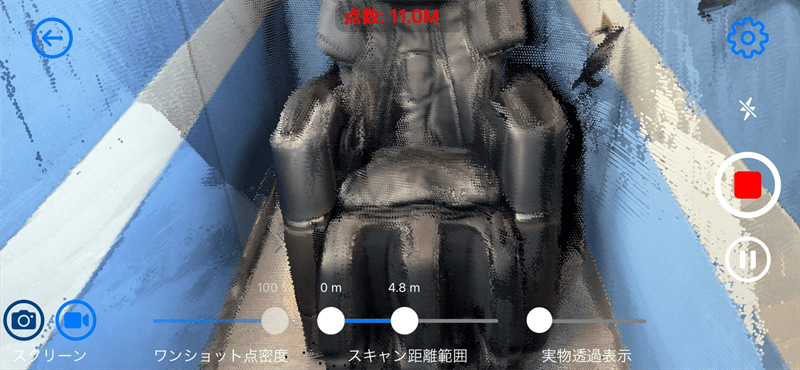
*The value is displayed in red, which means that there is not much free space on the device memory (iPhone 12 Pro).
If there are too many points to be obtained, a large amount of memory will be used. The device memory available for the measurement is limited and soon reaches its maximum.
This increases the number of shots and makes it difficult to align them in post-processing.
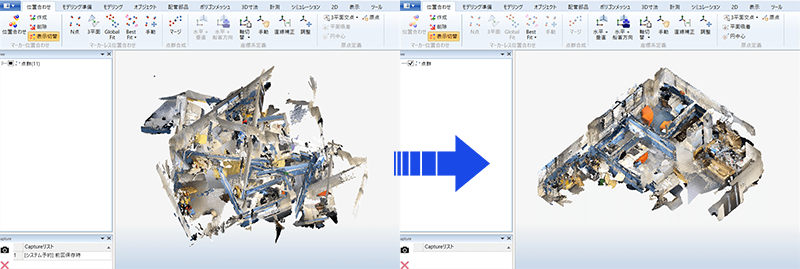
It was found that too many or too few point clouds will not produce good results; a moderate number is the key to success.
Of all the surveys conducted, this one was the most important for accurately measuring and efficiently using point clouds.
Specifically, the reference value varies depending on the application used, but Sakura 3D SCAN gave the impression that a density of 90–70% for a room of 7 × 7 × 3 m and a density of 70–50% for a larger area makes it easy to use.
Conclusion
In this survey, three different subjects were examined.
It is concluded that 3D measurements with an iPhone/iPad LiDAR scanner will give satisfactory results under the following conditions:
- Distance to the target object: 0.3 to 5 m
- Well-lit location, whether indoors or outdoors
- Moderate point cloud density
It was found that considering these three conditions during the measurement makes the data as usable as possible.
Part 2 of this article provides information on how to obtain more useful data using the original features of “Sakura 3D SCAN.”
March 1, 2022
tag : LiDAR Sakura3D SCAN