




点群・ポリゴン処理 地形データ活用 ドローン
航空測量からの地形データ活用方法 2 ~計測密度が低いデータからの地形データ復元~
航空測量からの地形データ活用方法 1では、計測密度が高いデータからの地形データ復元をご紹介しました。今回は、現在研究中の「計測密度が低いデータからの地形データ復元」をご紹介します。
データが全く存在しないエリアは、既存データ(国土地理院所有の高さ情報データなど)から必要な部分だけを切り取ってマージする方法が考えられます。しかし、現実には土砂崩れや風雨の影響で既存データとは全く異なる地形をしていることもあります。土木設計においては、極力あるがままの状態からの設計検討が求められています。
この研究では、計測データ内に一部でも地面を表現している点群データを含むことを前提とし、それを利用してデータを補間する手法をいくつか開発しました。
樹木の点群データを除外する処理は「計測密度が高いデータ」の際に採用した処理を使用しています。
計測密度が低いパターンを以下の4パターンに分類し、それぞれのアルゴリズムを考案しました。
用意したデータは、「計測密度が高いデータ」から意図的にデータを削除して作成したものです。
パターン①:エリア未測定
パターン②:エリア計測不足
パターン③:障害物による遮断
パターン④:計測密度が低い
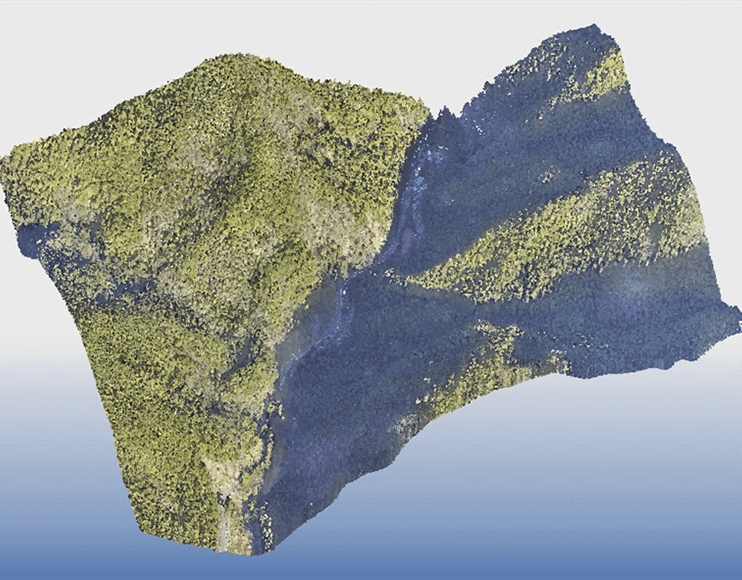
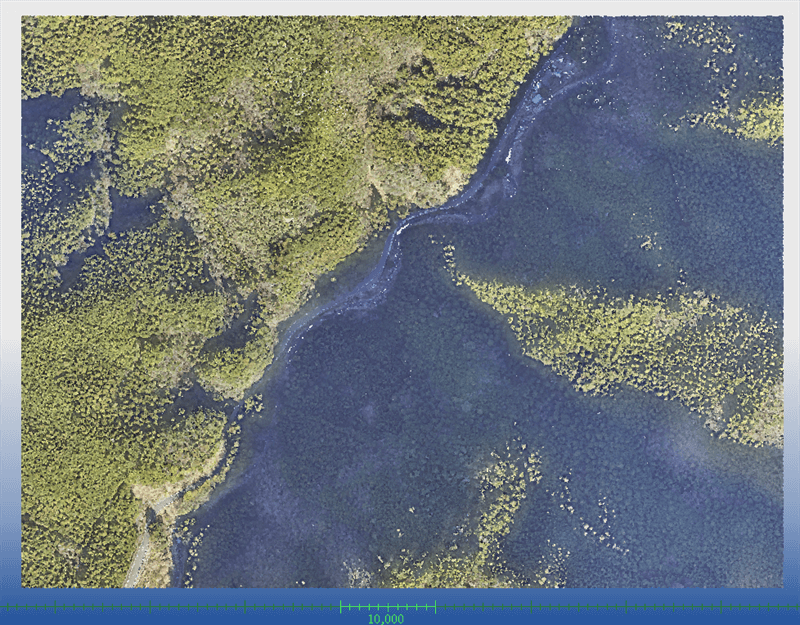
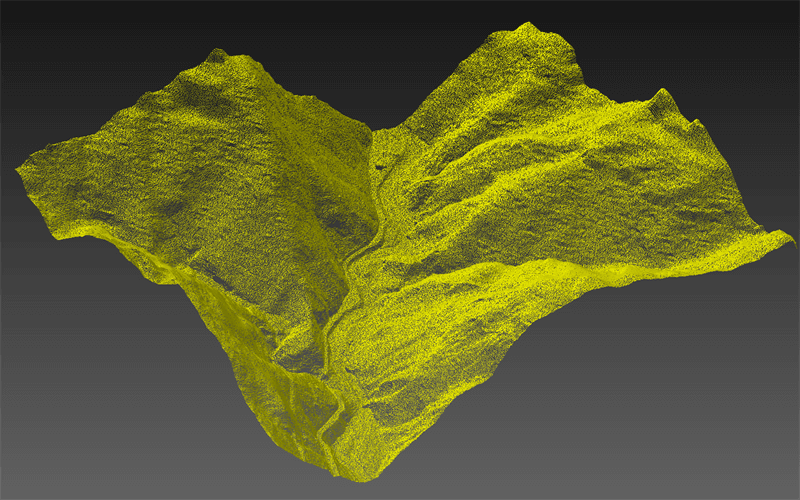
元々の密度が高いデータ
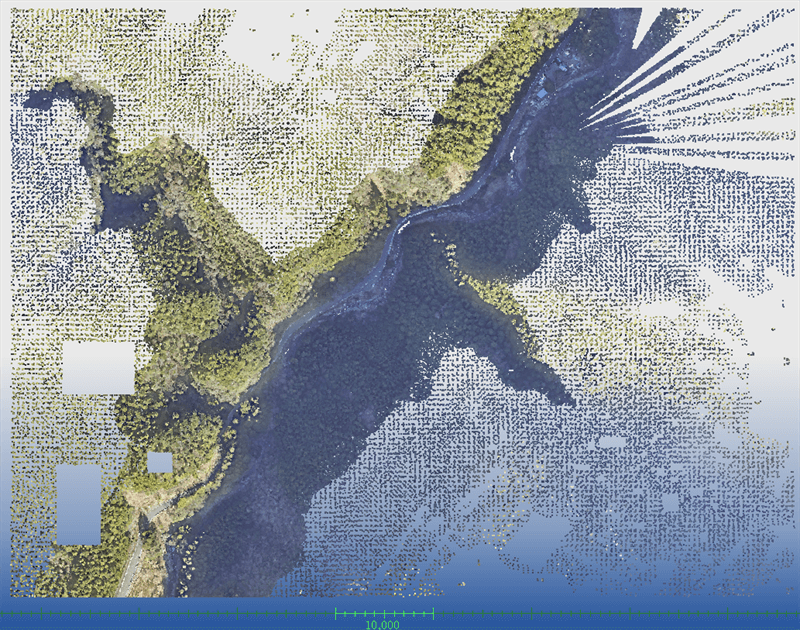
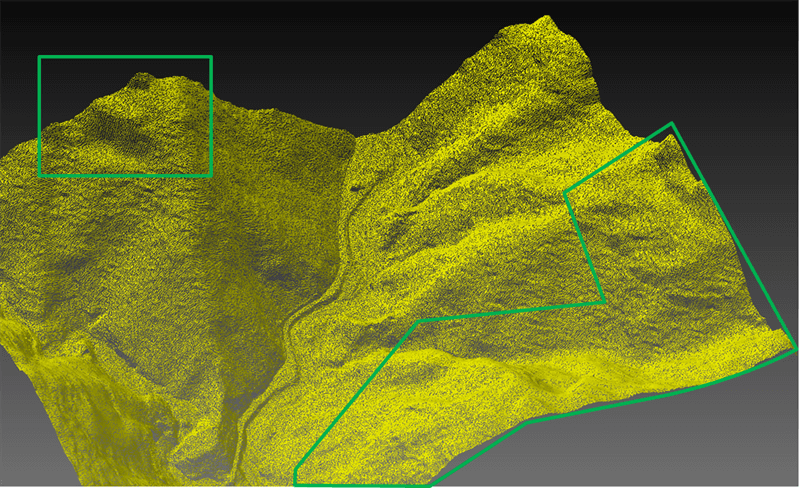
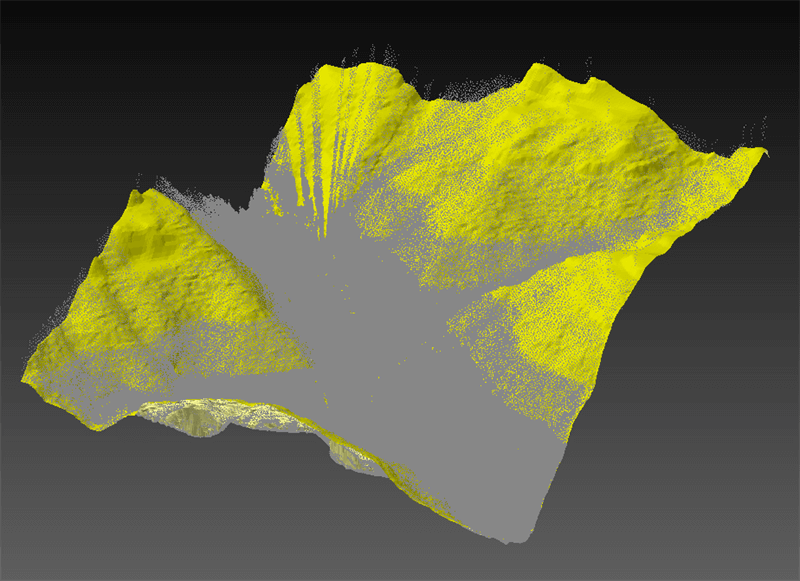
計測密度が低い・不均等なデータの作成
いくつかのパターンを想定して作成しました。
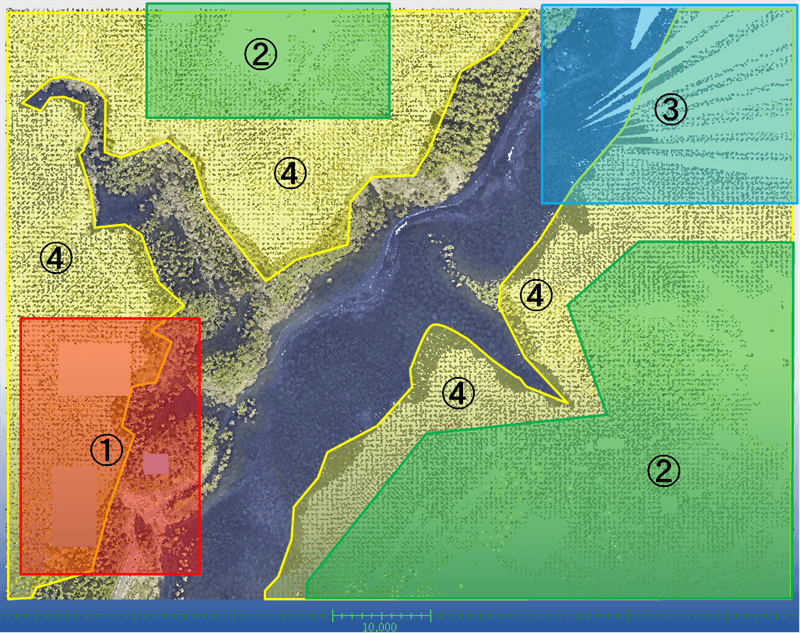
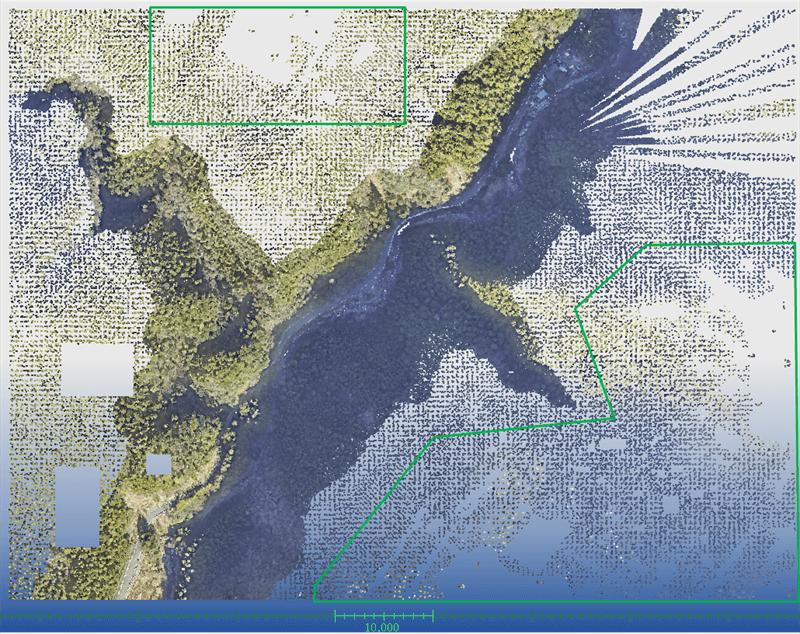
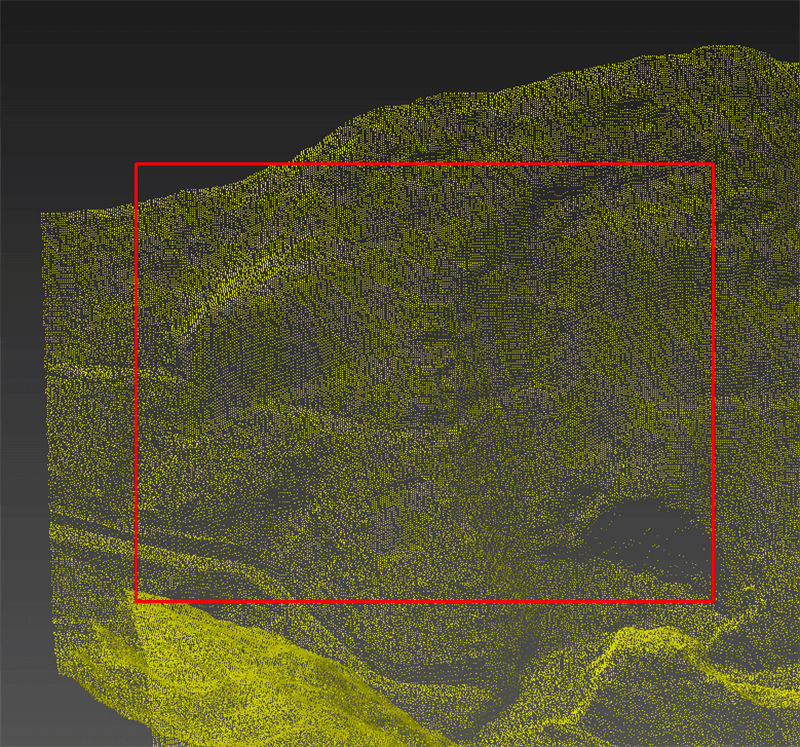
パターン①(赤色のエリア): エリア未測定
周辺を測定したが、ドローン飛行禁止エリアだったり、データの紛失だったりなどが原因で、一部のエリアの点群情報がない状態。

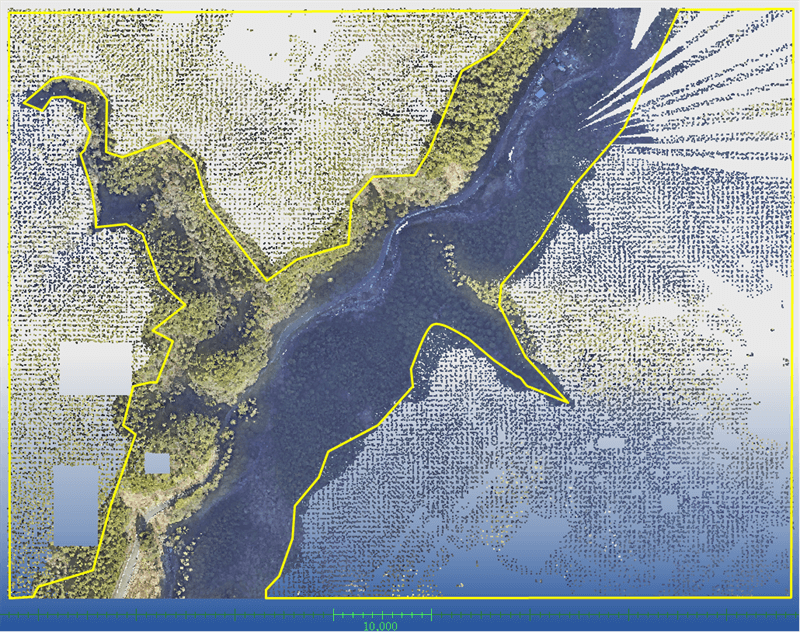
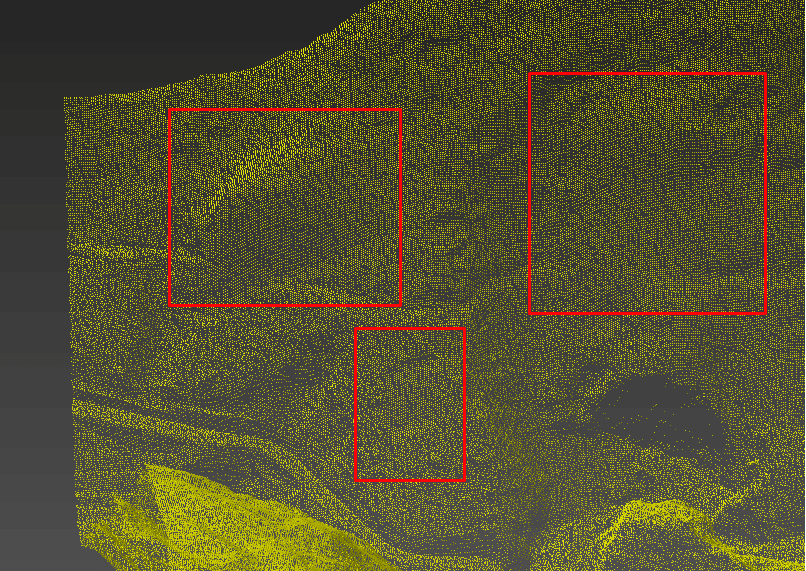
パターン②(緑色のエリア): エリア計測不足
地形などの原因により点群データの計測が困難で、一部の計測密度が極端に低い状態。
例: 歩きながら計測するモバイル式LiDAR測定機を使用しての密林、標高が高い山頂、深い谷などでの計測
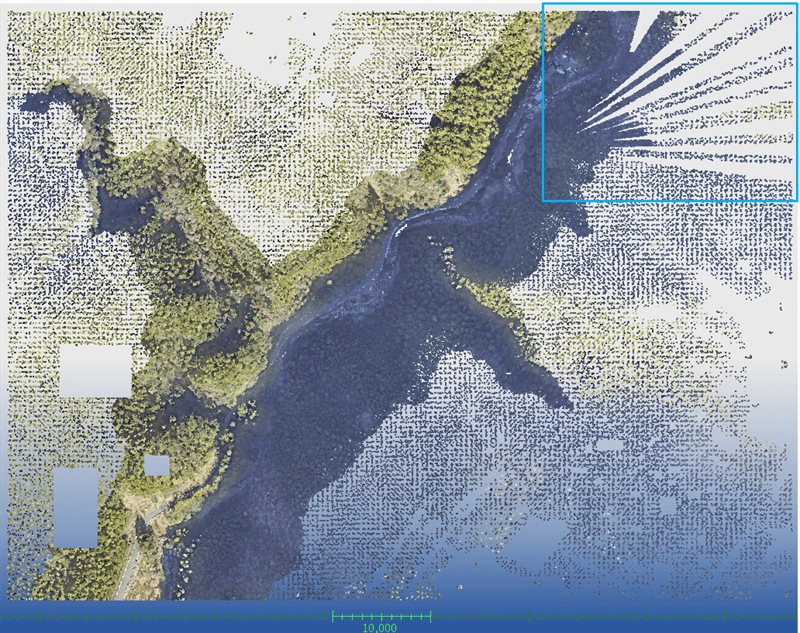
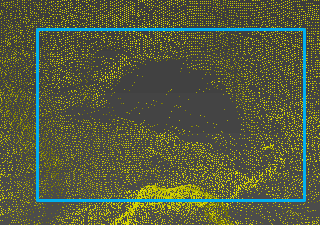
パターン③(水色のエリア): 障害物による遮断
測定場所が限定された条件で、障害物によってレーザーが遮断され、障害物の後ろのデータの計測ができない状態。
パターン④(黄色のエリア): 計測密度が低い
パターン①~③以外のエリア。ドローンなどの簡易測定機で計測し、計測密度が低い状態。
開発した補間手法での結果
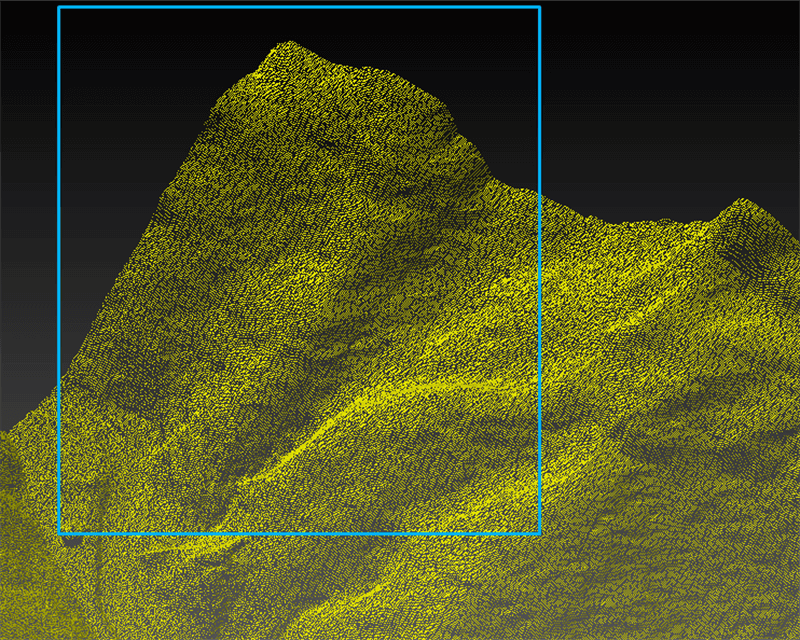
「パターン① エリア未測定」の対応結果
周辺点群の情報を利用し、未測定エリアの点群情報を補間しました。
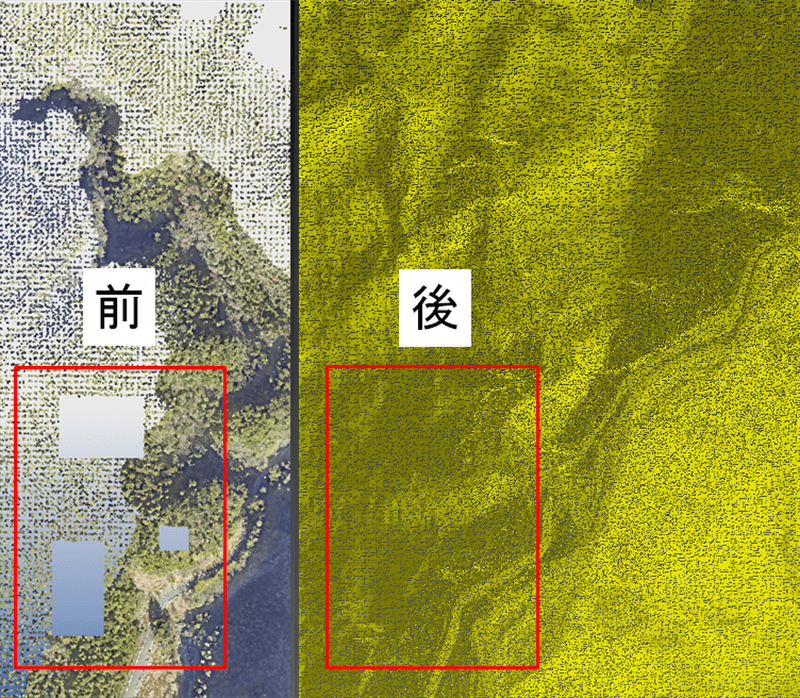
以下の部分は、崖段差です。 点群密度は足りており、 地面メッシュ生成には影響はありません。
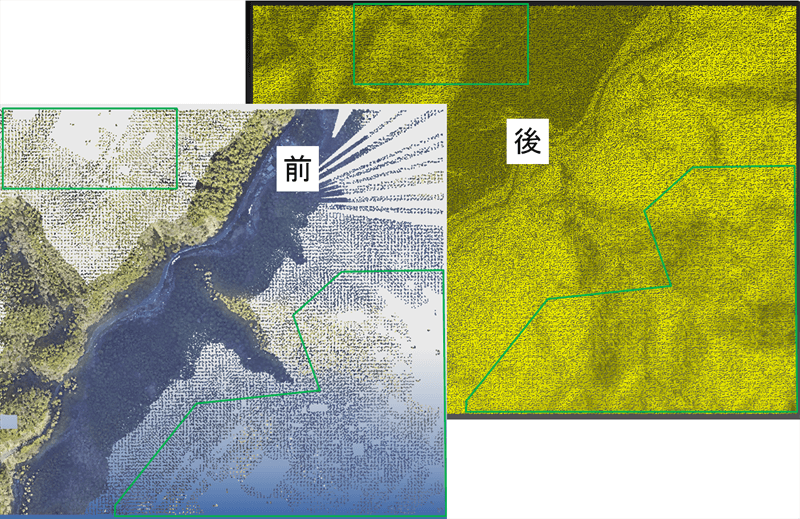
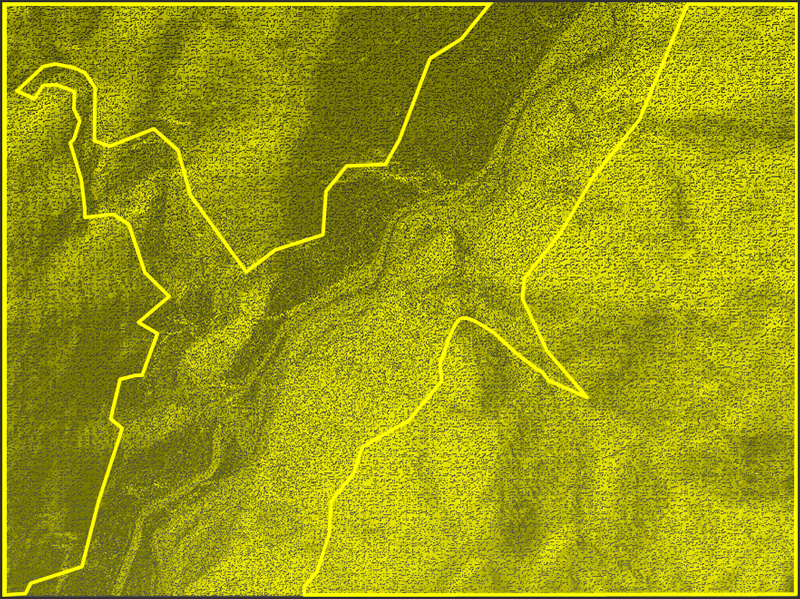
「パターン② エリア計測不足」の対応結果
既存点群を利用し、計測密度が極端に低い点群の補間ができました。
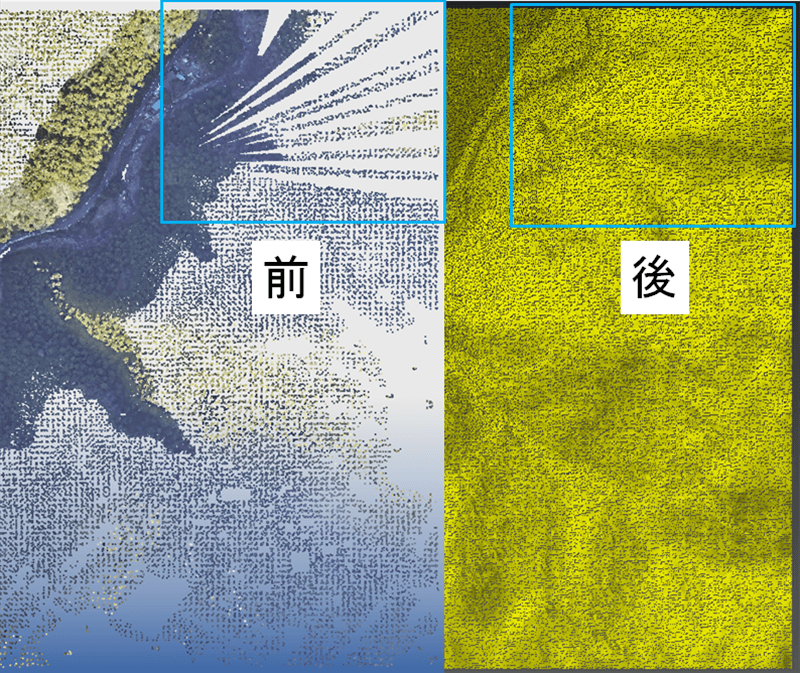
「パターン③ 障害物による遮断」の対応結果
遮断されてない部分の点群の情報を利用し、障害物に遮断された部分の点群を補間することができました。
「パターン④ 計測密度が低い」の対応結果
計測された点群から点群を補間し、高い密度の点群ができました。
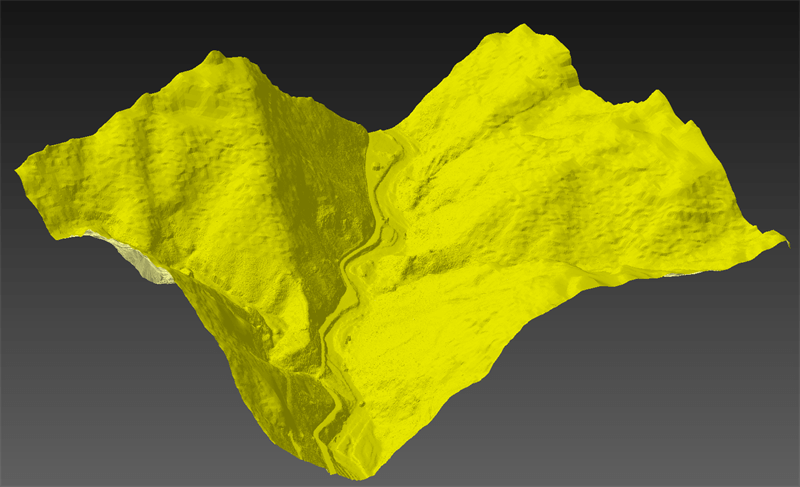
ポリゴンメッシュの作成結果
関連製品
大規模点群モデル化システム ClassNK-PEERLESS
研究担当

AXION事業部 穆凱圓
修士論文は「Isogeometric analysis of shell models with accurate curvatures represented by B-spline surfaces」。
入社以来、点群、ポリゴンメッシュ、曲線・曲面関連の仕事に従事。アルモニコス製検査ソフトspGaugeの開発を中心として活躍。2018年からは同社製リバースソフトspScanの開発を新しい舞台に。
※所属・肩書は記事掲載時のものであり、現在とは異なる場合があります。